End-to-end tests for Cyberknife treatment delivery with RayStation treatment planning system
Maud Jaccard,
Switzerland
PO-1716
Abstract
End-to-end tests for Cyberknife treatment delivery with RayStation treatment planning system
Authors: Nicolas Perichon1, Maud Jaccard1, Marie Fargier-Voiron1, Oscar Matzinger1, Shelley Bulling1
1Clinique Générale-Beaulieu, Swiss Medical Network, Radio-Oncologie, Geneva, Switzerland
Show Affiliations
Hide Affiliations
Purpose or Objective
End-to-End (E2E) tests are used to evaluate the geometric targeting accuracy of Cyberknife treatment delivery and to fine-tune the robotic targeting by means of the DeltaMan adjustment (improves the coincidence of the calibration point of the treatment robot and the imaging systems). All components of the treatment process including the treatment planning system (TPS) can affect the E2E results. Hence, E2E tests are a necessary part of the commissioning process for a new TPS for robotic treatment delivery (AAPM TG 135 recommendation). The purpose of this work is to perform E2E tests for Cyberknife plans with the RayStation (RS) 12A TPS for all collimator and tracking mode combinations (static and dynamic with respiratory) and to compare the results to results from the Accuray Precision TPS v3.3.1.0.
Material and Methods
E2E plans were prepared in RS and Precision according to the Cyberknife manufacturer’s guidelines. The same reference images of dedicated phantoms containing EBT3 Gafchromic films were used to prepare the plans in the two TPS. In Precision, an isocentric technique was used for all collimators (manufacturer recommendation), and in RS an isocentric technique was used for MLC plans and a non-isocentric technique for cones and iris (isocentric technique not available for cones and iris in RS). Plans consisted of a concentric dose distribution around a ball target (centered on the films in the phantom) with prescribed dose 4.2 Gy to the 70 % (+/- 5%) isodose line. In Precision, final dose was calculated with the Ray Tracing algorithm for iris and cone collimators, and with finite- pencil beam with lateral scaling for MLC. In RS, final dose was calculated using the collapsed cone algorithm for all collimators.
Treatment was delivered to the phantom with the appropriate tracking mode after setup using the imaging system. Tests were performed at the same time for the plans from both TPS.
Films were analyzed using the Accuray E2E film analysis software v4.0 with the threshold for the analysis set to the isodose line surrounding the ball (70% +/- 5%). The targeting error on each axis and the radial total error were reported.
Results
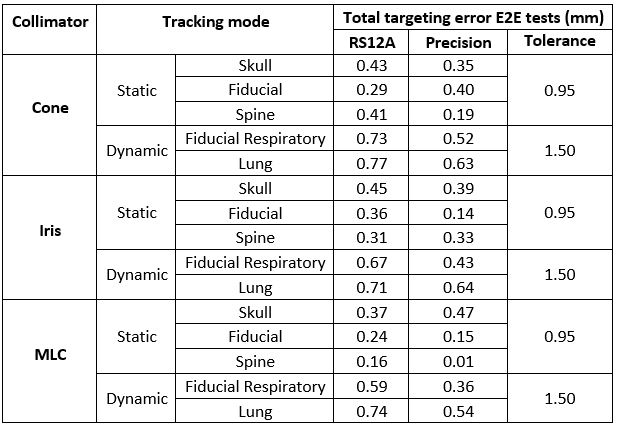
For all combinations of collimators and tracking modes, the RS results were within the manufacturer’s recommended tolerance (< 0.95 mm for static targets; < 1.5 mm for moving targets). Precision and RS E2E test results were equivalent within the uncertainty of the method (uncertainty 0.30 mm, see Table 1).
Conclusion
This study shows that RS can be used to generate E2E plans for Cyberknife with equivalent results to plans from the Precision TPS. An important outcome of this work is that E2E test results from RS plans can be used as input for the DeltaMan correction that is used to fine-tune the robotic targeting accuracy, and which must be done during Cyberknife commissioning and after robot remastering. For both TPS, the plans used for E2E tests must be prepared according to the manufacturer’s guidelines.